






![]()

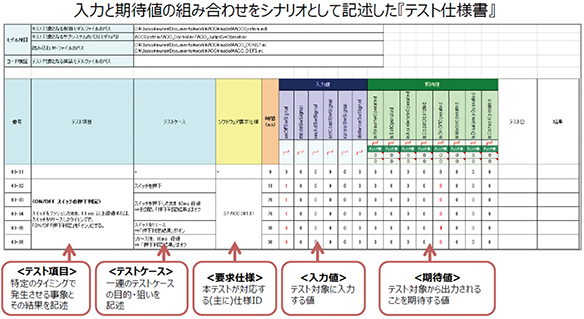
まず「単体検証」でサブシステムが仕様通りに動作するか検証します。その準備として、テストの内容を示した成果物となるテスト仕様書を作成します。
初めに、テスト対象となるモデルからテスト仕様書のテンプレートと入出力信号名のリストをExcel形式で自動的に生成します。
次に、テストシナリオごとのテストケースとテス ト項目を作成します。テストシナリオは要求の仕様化で作成した「要求仕様書」がベースとなります(「要求の定義と仕様化」をご覧ください)。テストシナリオ別にシートを分け、テストケースとテスト項目、入力値と出力期待値を定義します。
このようにテスト仕様書の入力に要求仕様書を利用することで、ISO26262で重視される要求と実装のトレーサビリティを満たすことができます。
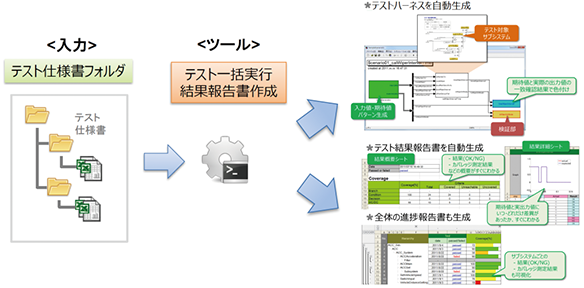
作成したテスト仕様書からテストハーネス(シミュレーション検証用のモデル)を生成してテストを一括で実行し、その結果をテスト結果報告書として自動生成します。
報告書では、テスト結果をサブシステム単位や要求仕様単位といった観点別に確認することができ、期待値と実出力値が合致しているかどうかを判定して表示します。カバレッジ測定ツールと連携すれば、モデル内やテストシナリオ単位での網羅率を計測し表示することも可能です。
このような自動化によってミスなく効率的なテストが可能となり成果物も確実に残すことができます。
![]()
![]()




