






![]()

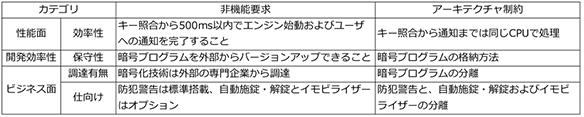
前ページの図5で示した論理アーキテクチャに対して、非機能要求や制約に配慮した実際の「モノ」としての構成を物理アーキテクチャと呼びます。物理アーキテクチャの構築には、まずは下表のように、「車両盗難防止システム」の非機能要求を実現するために必要なアーキテクチャ制約を導出し、先に定義した論理アーキテクチャに対しこれを満たすような変更を施していくことになります。
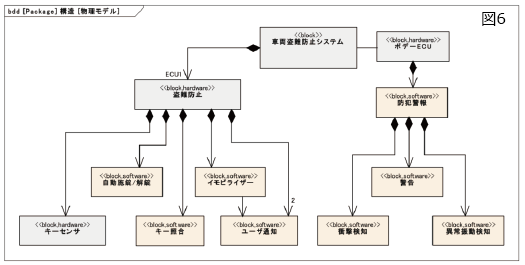
表のアーキテクチャ制約に対し、さまざまなトレードオフ分析を行い、全体最適な視点で決定した物理アーキテクチャが図6です。ここでは、ハードウェアとソフトウェアの区別、および、それらがどのように配置されるかを見て取ることができます。今回は、性能面およびビジネス面での制約から、盗難防止とボデーECUの2つのCPUに各構成要素となるブロックが分割配置されたことが分かります。
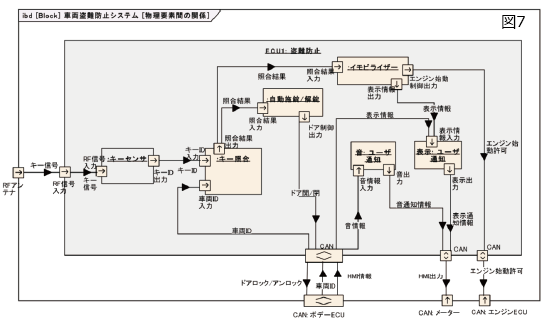
さらに図7のように、各要素間のつながりや、やり取りされる情報などを表現できる内部ブロック図を活用することで、設計したアーキテクチャの妥当性をモデルを使って早い段階で検証することができます。このような手順を踏むことで、多様で大規模なシステムに対しても、トップダウンかつ全体最適なアーキテクチャを事前に検討することが可能になります。
![]()
![]()

